
剛好看到露天有人在賣全新的RC伺服馬達…含運不貴,就買回來了
居然是民國83年的東西!!!太神啦

拆開後開心的轉看看,奇怪,怎轉不動

沒想到是這顆螺絲在作怪,印象中的RC馬達沒這個螺絲

先拆下

拆下後果然可以從Hi轉到Lo了

這張圖來說明一下六格的內容
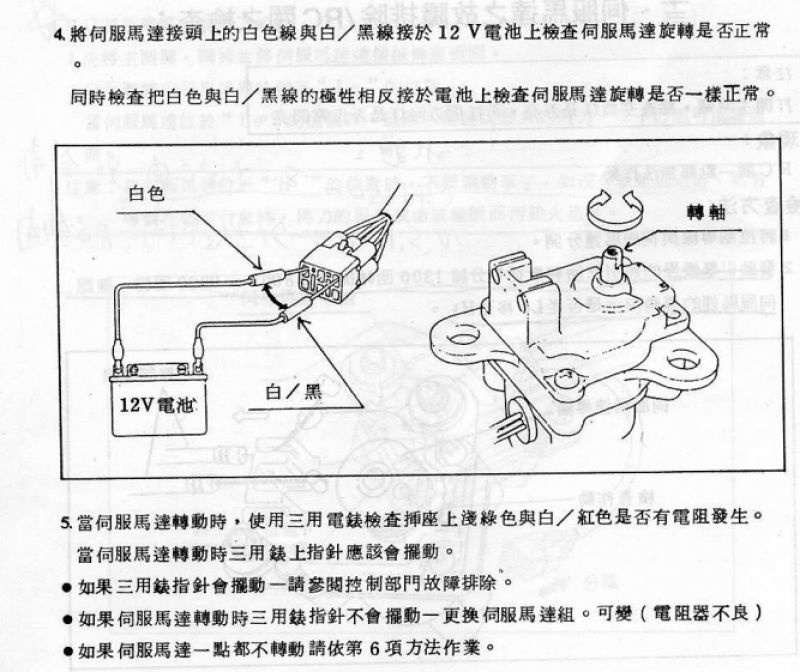
參考一下NSR的維修手冊Page20

要用12V的電,供到「白」、「白/黑」
轉軸就會正轉或反轉
實測以後
「白」接「正12」,「白/黑」接「地」,指針會往「Hi」方向移動
(而且會轉超過Hi)
|
白
(接正12V)
|
淡綠色
|
白/黑
(接地)
|
白/紅
|
無接
|
藍/綠
|
反之
「白」接「地」,「白/黑」接「正12」,指針會往「Lo」方向移動
(而且會轉超過Lo)
|
白
(接地)
|
淡綠色
|
白/黑
(接正12V)
|
白/紅
|
無接
|
藍/綠
|

上圖是正常指針指到Lo的位置(用手轉過去)

如果把指針轉到「遠低於Lo的極限」,量測中間的「淡綠」、左下的「白/紅」
會得到 1KΩ 整左右

如果把指針轉到「正常Lo的位置」,量測中間的「淡綠」、左下的「白/紅」
會得到 1.85KΩ 左右

如果把指針轉到「正常Hi的位置」,量測中間的「淡綠」、左下的「白/紅」
會得到 3.43KΩ 左右

如果把指針轉到「遠高於Hi的極限」,量測中間的「淡綠」、左下的「白/紅」
會得到 4.11KΩ 左右
所以得出下表:
| 項次 |
量測方法 |
數值 |
| 1 |
遠低於Lo的極限 |
1KΩ |
| 2 |
Lo |
1.85KΩ |
| 3 |
Hi |
3.43KΩ |
| 4 |
遠高於Hi的極限 |
4.11KΩ |
思考:
因為我也打算自己作一組RC電腦,目前用二期的電腦,在2000~3000轉左右,RC會全開一次,造成起步有點憨,如果作RC測試只在電門打開後開關個2、3幾次,應該就夠了,清積碳的頻率應該不需要縮短到每次起步都要清…
如果把 RC 開啟分成4個階段:
項次
|
階段
|
角度 |
數值
|
1
|
7000轉以下
|
Lo |
1.85KΩ |
2
|
7000~8000
|
30% |
1.85+0.53=2.38KΩ
|
3
|
8000~9000
|
60% |
2.38+0.53=2.91KΩ |
4
|
9000以上 |
Hi |
2.91+0.53=3.43KΩ |
(3.43-1.85)/3=0.53
RC伺服馬達利用「白,白/黑」線的正反輸入來達到馬達旋轉,那麼如果要自行開發RC:
1、偵測目前引擎轉速(必作)
2、隨時偵測「淡綠 VS 白/紅」的電阻來確定目前RC的開度?
3、如果照這樣子線性增加就會比較好騎嗎?還是要曲線增加,先微開後超展開?
4、如果在回油門時,轉速下降,也是比照轉速下降來關閉RC嗎?
5、轉速改變如7000~8000上下來回,偵測到的轉速訊號,要給予RC多久時間固定方向旋轉,如果正反電極連續改變,造成馬達旋轉方向連續拉扯,應該很傷RC伺服內部齒輪?
6、如果要用89C51來實作此RC電腦,應先進行以下練習:
(1)轉速訊號偵測,顯示在7段顯示器上
先使用之前用來測試FZR轉速表的訊號(555版)作為轉速訊號輸入。
並參考前輩:http://www.zclub.com.tw/discuz/thread-117727-1-1.html (killpeoplefzr fzr_7)
直接接入FZR轉速訊號的方法,來實作NSR150來自CDI(紅/白)線的訊號。
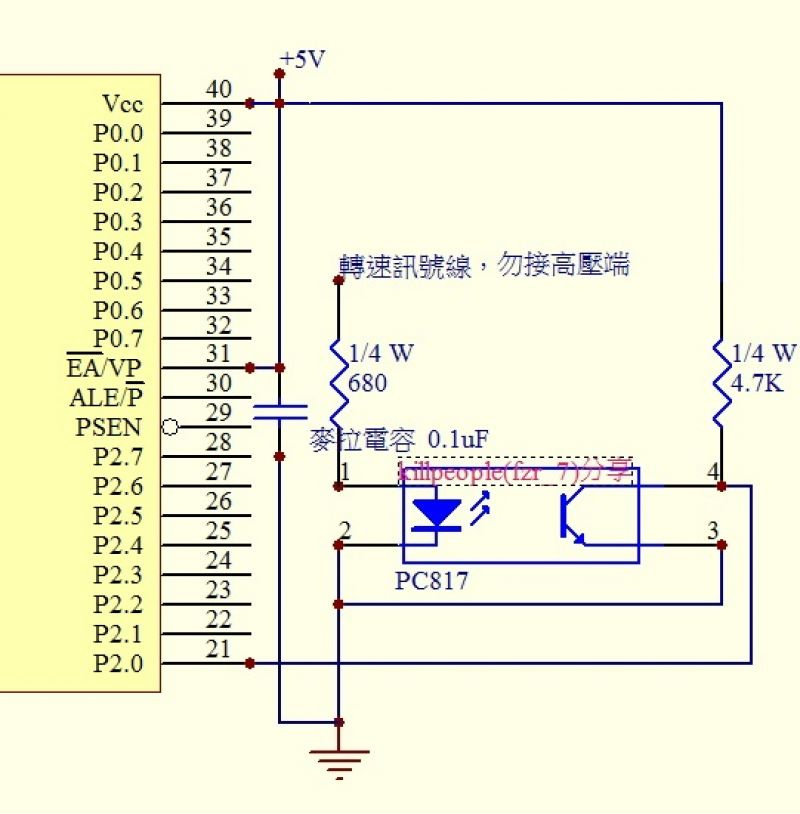
轉速訊號用 PC817 讀取的方法
先求準確度在 千位即可,顯示在單顆7段顯示器上。
(2)電阻阻值偵測,顯示在7段顯示器上 (會需要使用ADC0831)
參考:http://faculty.stust.edu.tw/~wjshieh/adc.html
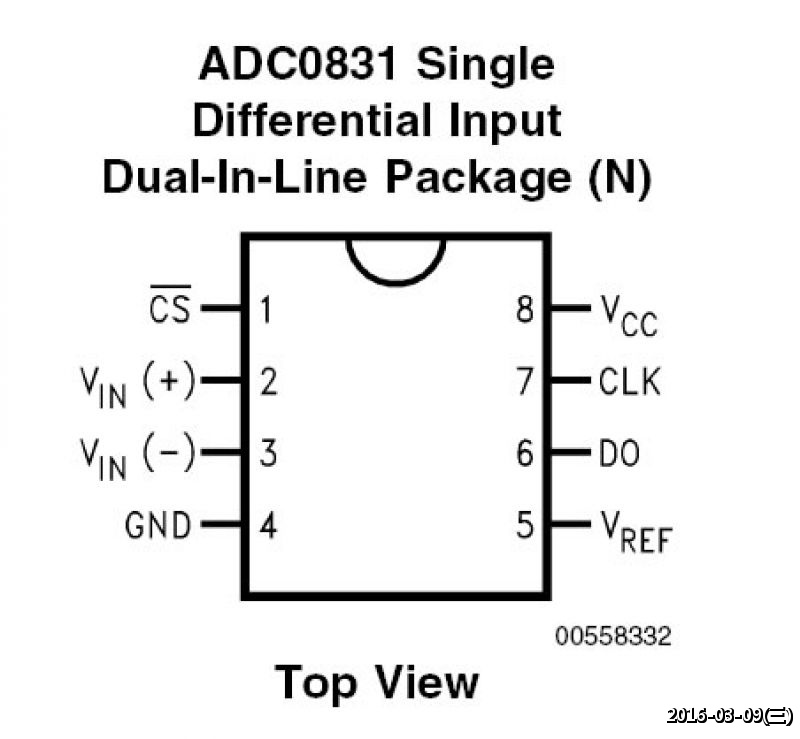
參考:http://forums.parallax.com/discussion/92728/properller-adc0831-voltmeter
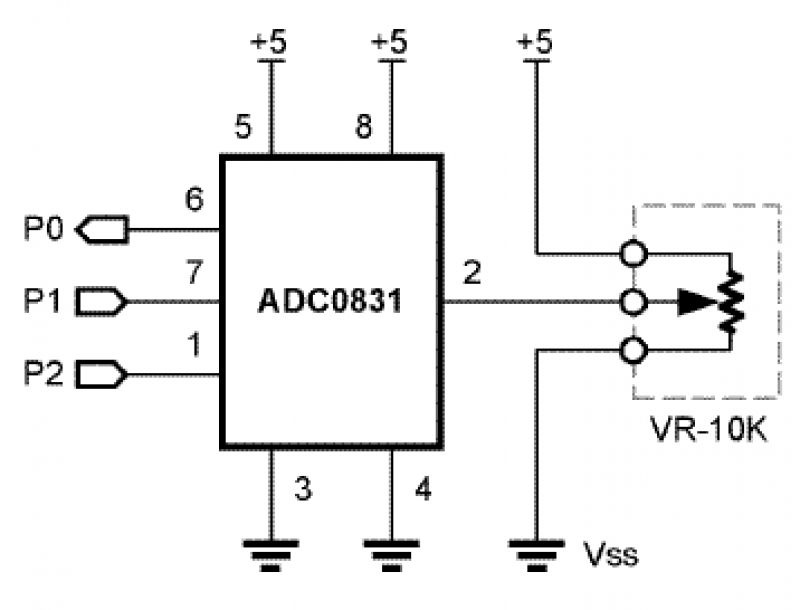
此圖的概念很像NSR150用的RC,1.85K~3.43K
假設+5V從「白/紅」線餵入,「淡綠」接「2」,「藍/綠」接「VSS」(地)
就可以持續的讀出目前「RC伺服馬達」的「指針位置」...
(3)正、負電電壓訊號切換於「白,白/黑」線,以達成正、反轉之功能,且要能驅動12V電壓。(不知道TIP122是否能勝任)
(4)把RC的旋轉當作步進馬達,每次作短程配電,每100ms配一次電壓脈波並馬上讀取ADC值作為下次旋轉參考?
(5)如連續 N 次進行重覆的校正失敗(可能代表RC卡住,每一段時間呼叫蜂嗚器提醒(可關閉))並跳過校正,避免電路燒毀?
(6)其他(也許有其他控制RC的方法,我想錯了)















